Robotics 3 videos
Cup Holder Video
2 inch gap video
Ultrasonic Sensor
Robotics questions
1. State the assignment (problem/project) in your own words.
Our robotics class was assigned to program a robot so that it could move the distance of two tables with two 2 inch gaps that it must cross in one video, the other video the robot must hold a cup of legos and cross the gaps, and the last video you must program the ultrasonic sensor into the robot and make it recognize the box, stop, then continue moving.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
We had to at least be able to first make the robot with legos stand on its own wheels before programming it so we would at least know that it can move once its programmed.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
We had first built a robot with legos, and two wheels in the back and one in the front. once the robot looked complete, we went on the program Lab view and programmed the robots according to each of the three videos, programmed the speed and timing for how long the motors will run, plugged the ultrasonic sensor in as well for the last video. For the cup video all we did was attach a cup holder built of legos at the top of the battery, filled the cup with legos then placed it on top.
4. Describe the final output / product in detail: (what are we looking at?)
A robot that was made with legos, programmed with the program/app Labview, that is capable of accelerating motors, moving distances with weight on it and crossing gaps, a robot that also can recognize objects, stop, and continue going.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor etc.. How did you use this feedback to correct issues with your project?
There was one time that our robot was struggling making it over the two inch gaps and a peer had suggested that we turn around our robot and make the motors go reverse and that had made it go across the gaps effectively.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc ? ,
I had learned to build a robot with legos and motors/battery, I had also learned how to use a programming app and how to work with its software.
7. If you were to do the project again, what would you do differently and why?
Describe one challenge in building and programming the robot.
If I were to do the project differently, I would have made a more complex robot now that we know how to create it. One difficulty my group had was programming the motors exactly how they were supposed to be.
Our robotics class was assigned to program a robot so that it could move the distance of two tables with two 2 inch gaps that it must cross in one video, the other video the robot must hold a cup of legos and cross the gaps, and the last video you must program the ultrasonic sensor into the robot and make it recognize the box, stop, then continue moving.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
We had to at least be able to first make the robot with legos stand on its own wheels before programming it so we would at least know that it can move once its programmed.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
We had first built a robot with legos, and two wheels in the back and one in the front. once the robot looked complete, we went on the program Lab view and programmed the robots according to each of the three videos, programmed the speed and timing for how long the motors will run, plugged the ultrasonic sensor in as well for the last video. For the cup video all we did was attach a cup holder built of legos at the top of the battery, filled the cup with legos then placed it on top.
4. Describe the final output / product in detail: (what are we looking at?)
A robot that was made with legos, programmed with the program/app Labview, that is capable of accelerating motors, moving distances with weight on it and crossing gaps, a robot that also can recognize objects, stop, and continue going.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor etc.. How did you use this feedback to correct issues with your project?
There was one time that our robot was struggling making it over the two inch gaps and a peer had suggested that we turn around our robot and make the motors go reverse and that had made it go across the gaps effectively.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc ? ,
I had learned to build a robot with legos and motors/battery, I had also learned how to use a programming app and how to work with its software.
7. If you were to do the project again, what would you do differently and why?
Describe one challenge in building and programming the robot.
If I were to do the project differently, I would have made a more complex robot now that we know how to create it. One difficulty my group had was programming the motors exactly how they were supposed to be.
ultrasonic sensor programs
Light Sensor Programs
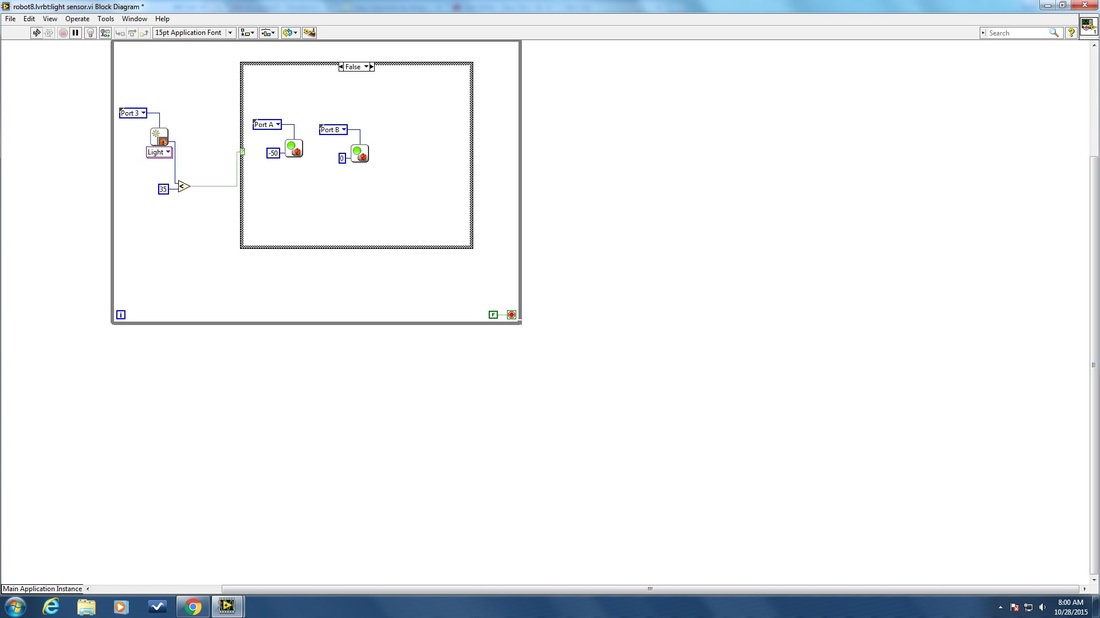
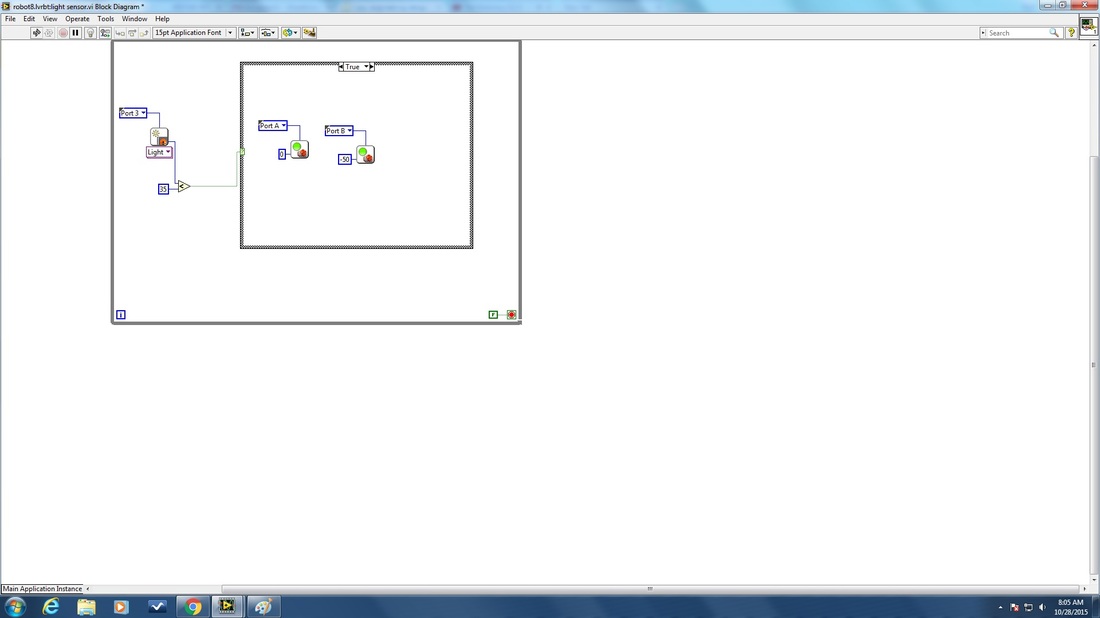
Light Sensor Video
TUG BOT powerpoint

Battlebot
|
robot project
A Robot Project Virtual Instrument features an enhanced interface that allows you to configure and test your robot without a program, as well organize multiple program files in one place. A Robot Project Virtual Instrument contains a single Front Panel and Block Diagram, and can be used to create a single program and interface.
|
|
